Hi, I'm
Jia Xie谢佳

I'm a Master's student at Carnegie Mellon University, advised by Guanya Shi.
I hand-build, teach, and use robots in the physical world.
-
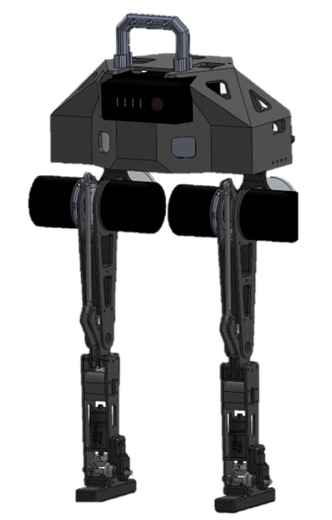
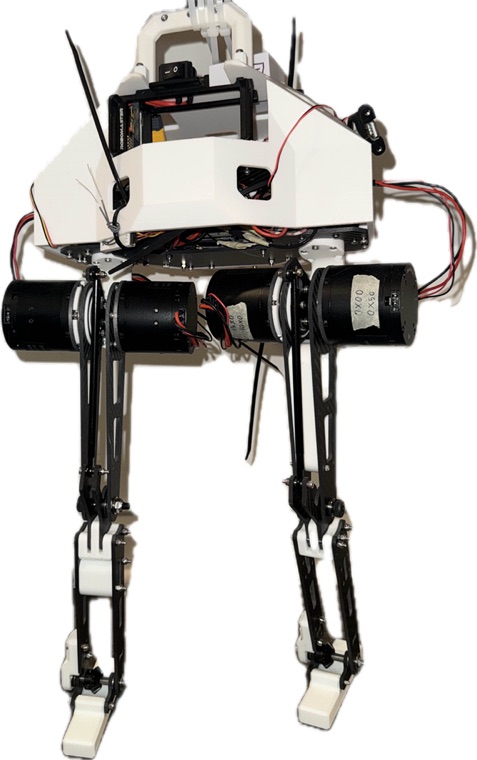 Mini humanoid
Mini humanoid
- Wheeled bipedal robot
-
Robotic arms
-
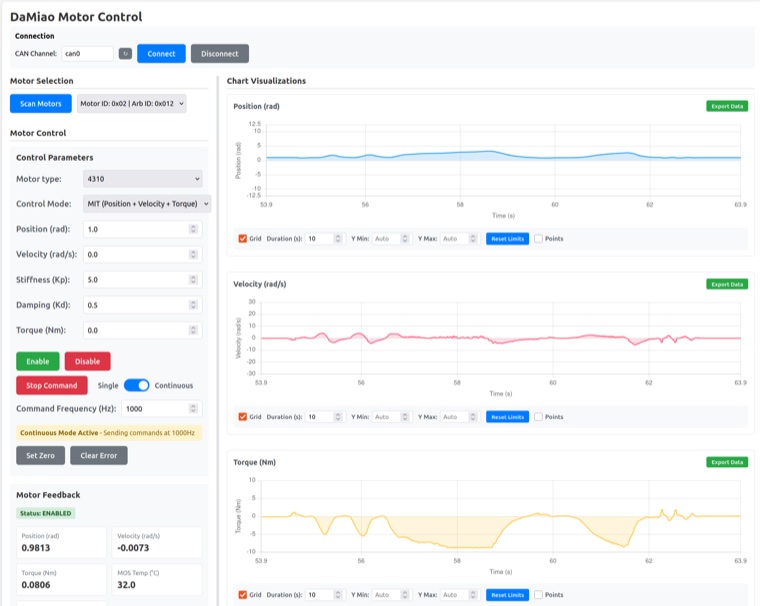 DaMiao Motor
DaMiao Motor

Robotics has been a passion for my whole life. I've competed in FLL, VEX, FTC, and RoboMaster.
- nowOn-going
Student pilot
Closing in on my private pilot license
Badminton
Where you'll find me otherwise